客製化智慧育苗系統開發
- 刊登日期: 2019-03-12
| 執行方法及步驟 | 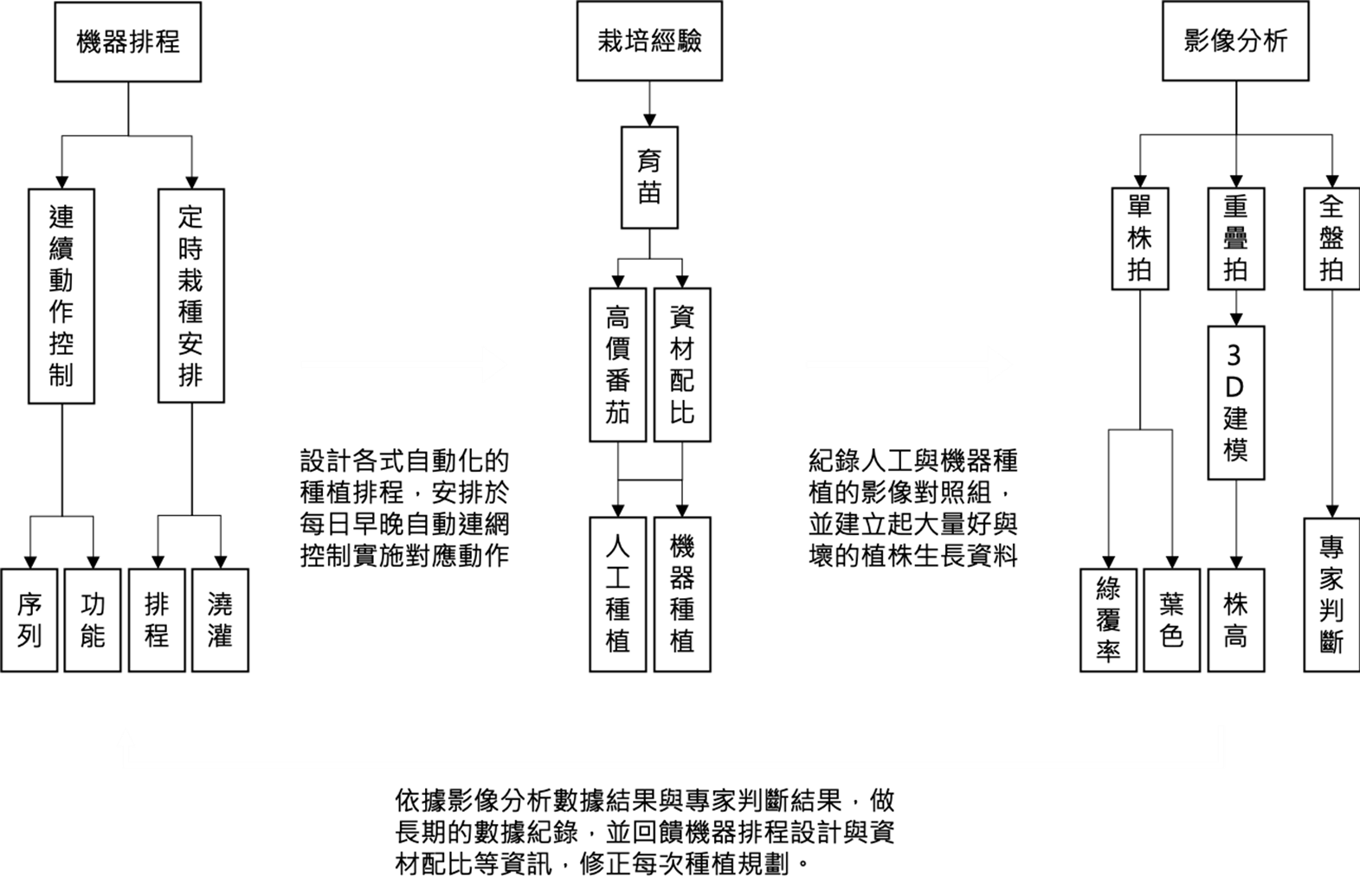 (一)機器排程: 使用Farmbot網路頁面遠端設定機械手臂排程,能在安排的時間點自動進行指定的澆灌作業或其他自訂排程,進行予以植物定時定量澆灌、給肥之連續動作。 (二)栽培經驗: 選擇高經濟價值、生育勢強與適合室內環境栽培之番茄為實驗樣本,分以人工、機器兩種方式栽培,共二期。 1. 水分:以濕度檢測當日土壤含水量於30%以下才澆透土壤。人工以灑花器澆灌,水量不定。機器則每穴格逐一給予18ml的水量,並依當日土壤情況與苗株成熟度增減水量或依苗株大小調整澆水力道。 2. 肥料: 植株子葉長出、本葉未長出時,以每3-5天頻率使用機器對每穴格施予20ml的肥料量,並在施肥當日停止澆水作業。 (三)影像分析: 育苗過程共進行三種影像採樣-單株拍攝、重疊率拍攝、整全穴盤拍攝。每日進行單株、重疊率拍攝,整株拍攝則取第21天的影像資料。單株拍攝用以分析植株葉色;重疊率拍攝後作3D建模進而分析植株高度。專家依據全穴盤拍攝影像判別苗種健康度,藉此作為育苗影像分析之依據。 |
| 執行績效 | 本計畫選擇高經濟價值作物—番茄開發適合都市的小面積智慧化育苗系統,透過自動化栽培的機器手臂,兼具能針對作物品質與種植規格執行自動化栽培與資訊控管的技術能力,使單位面積的農業產值最大化。機械手臂透過雲端進行遠端控制,利用感測器判斷是否實施澆灌,以及精準的澆灌量,減少人力問題。栽種過程透過影像拍攝監測生長狀態(如葉色、綠覆率及株高等性狀) ,配合專家經驗資料,利用隨機森林分類辨識影像中作物生長,正確率達75.9%。 |
| 結論與建議 | 1. 建立番茄之機器育苗模式,可複製於其他高經濟作物之育苗,以精確澆灌模式客製化育苗,節省育苗人力成本。 2. 建立Farmbot排程模組化,可依前次種植結果微調,並依需要擴增機器組數。 3. 可即時監測植株生長狀況,供給精準澆水、施肥,控制育苗品質,並縮短育苗時程。 4. 目前使用官方雲端網站服務控制機器,未來可利用本地端伺服器建置機器控制與資料分析平台。 5. 未來可複製於其他作物,以實現多品項應用,並針對單植株需求實施不同澆灌,提昇良苗率,將育苗效益。 |
| 附件 | 附件1 |